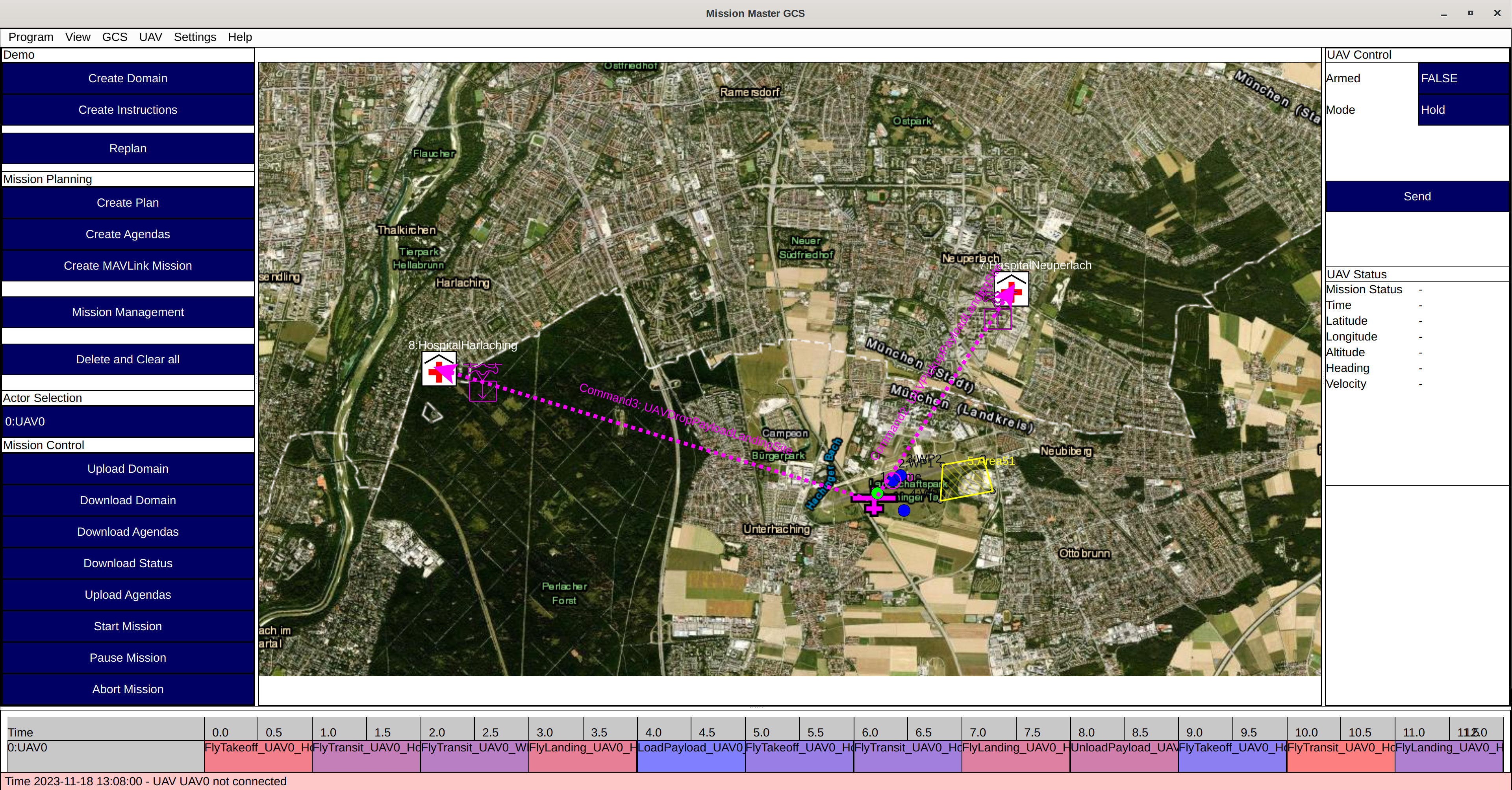
UAV-Missionscomputer mit Bodenkontrollstation
Kundenproblem
- Kundenspezifisches Missionsführungssystem für unbemanntes Luftfahrzeug
Lösung
- Systemdesign und Programmierung
- Integration in Projektverbund über Schnittstellen
- Unit-, Komponenten- und Integrationstests
- Flugdemonstration beim Kunde
Werkzeuge
- Programmiersprache C++/Qt unter Linux
- Microcontrollerprogrammierung (auf Arduino Basis)
Hintergrund
Für einen Kunden im forschungsnahen Umfeld wurde ein Missionsführungssystem für ein unbemanntes Luftfahrzeug (UAV) entwickelt. Das System besteht aus einem Missionscomputer (Software) und einer Bodenkontrollstation. Dabei werden Missionspläne generiert, auf die Flugplattform übertragen und automatisiert abgearbeitet. Die Funktionsfähigkeit wurde beim Kunde anhand einer Flugdemonstration nachgewiesen.
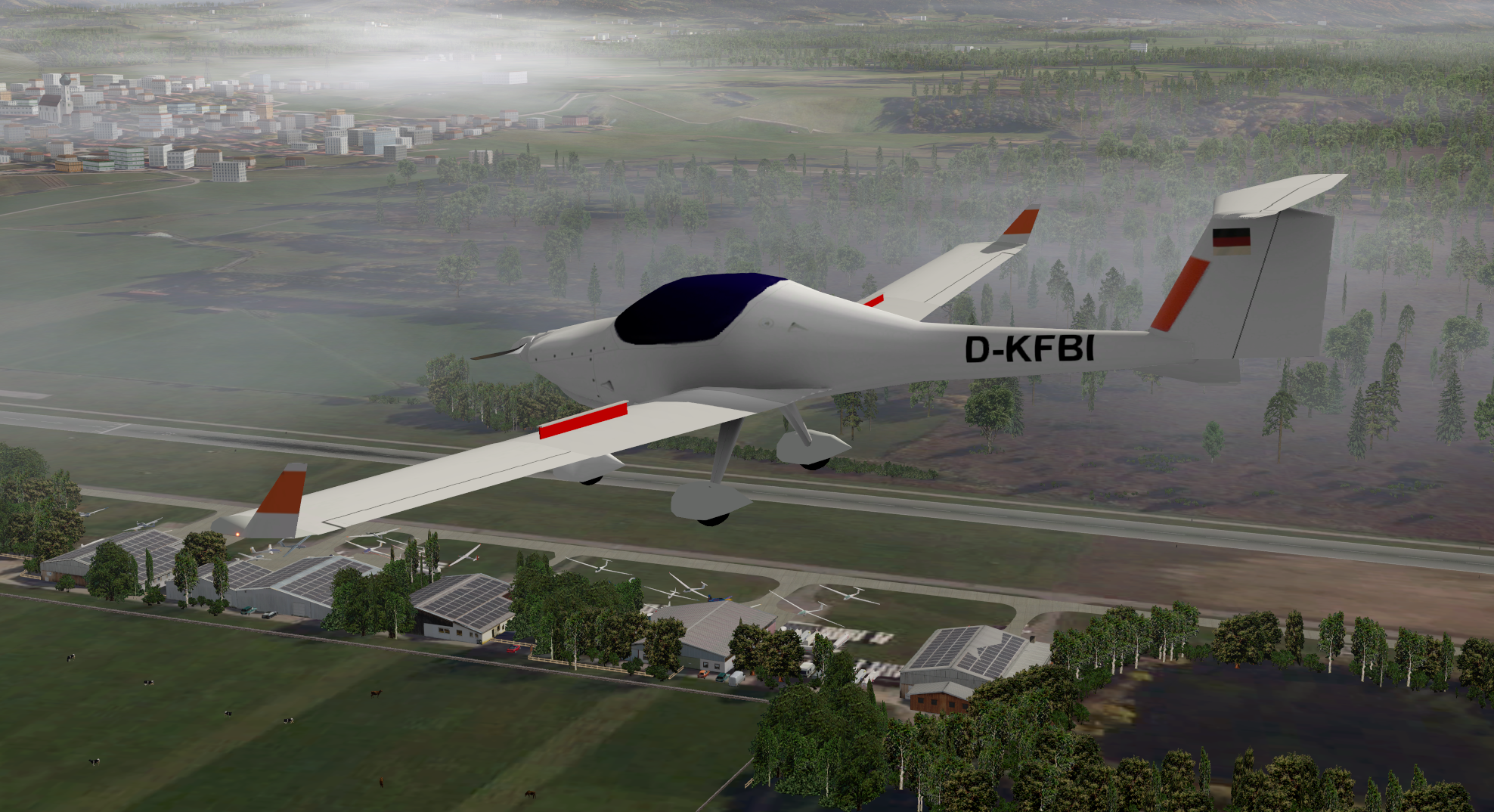
Flugsimulation
Kundenproblem
- Visualisierung des Flugzustands eines unbemannten Luftfahrzeugs
Lösung
- Entwicklung eines Flugsimulator-Plugins
- Programmierung einer Schnittstelle
- Filterung und Datenfusion der Flugzustandssignale
Werkzeuge
- Programmiersprache C++
- Flugsimulator X-Plane
Hintergrund
Für den Kunde im forschungsnahen Umfeld wurde eine Schnittstelle zur Visualisierung des Flugzustands einer Drohne im Flugsimulator X-Plane geschaffen.
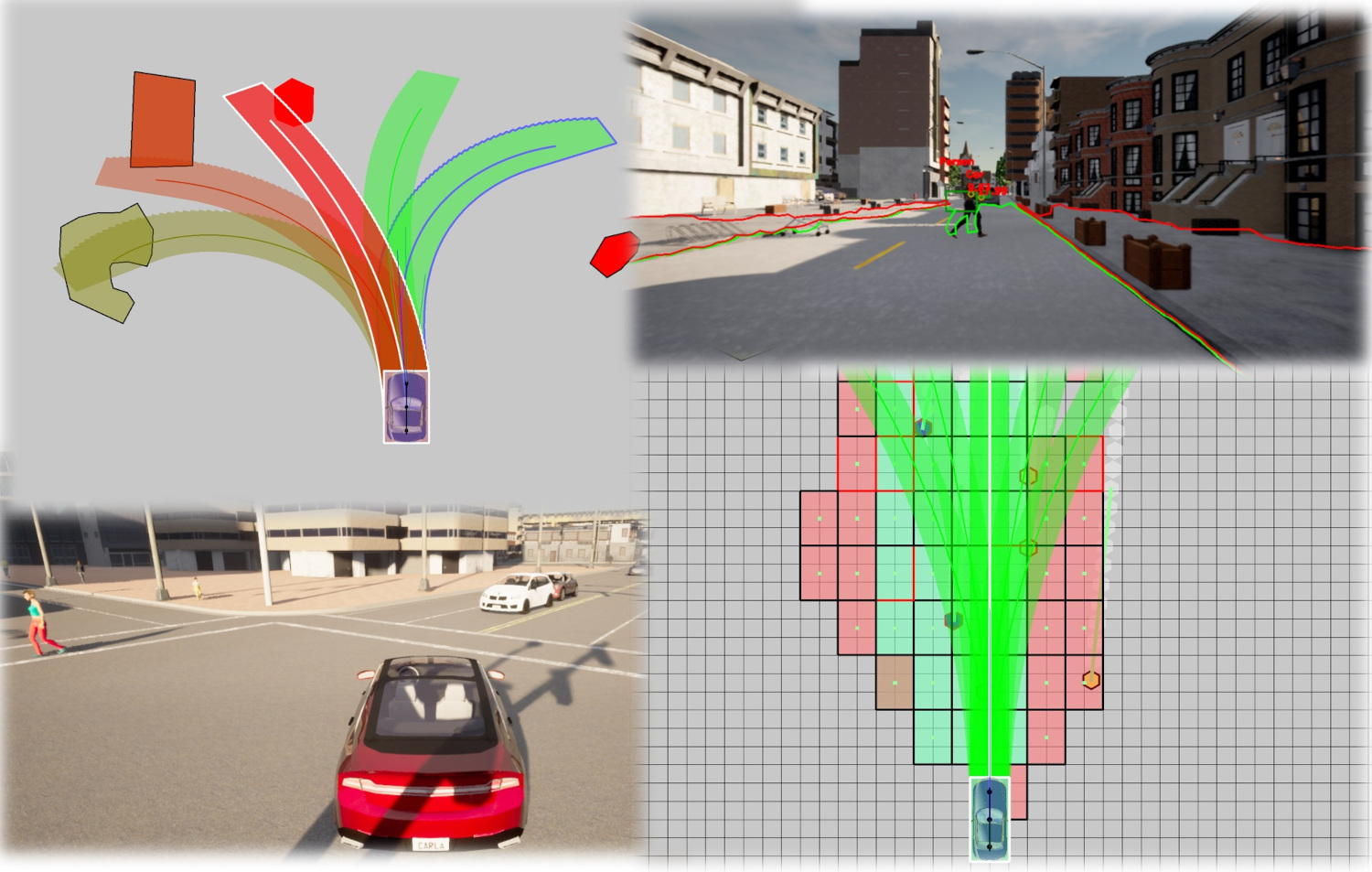
Priorisierung von Ausweichmanövern beim autonomen Fahren
Kundenproblem
- Priorisierung von Ausweichmanövern
Lösung
- Modellierung (Fahrzeug, Umwelt, Kollisionen)
- KI-Algorithmen (Perzeption, Entscheidungsfindung)
- Programmierung
Werkzeuge
- Programmiersprachen C++ und Python
- Fahrsimulator CARLA
Hintergrund
Im Rahmen eines EXIST-Projekts wurde eine Fahrsimulation mit CARLA entwickelt. Dabei wurde der Umweltzustand mit Hilfe von KI-Algorithmen erfasst und der aktuelle Fahrzustand mit Hilfe eines Fahrzeugmodells in die Zukunft projiziert. Mit Hilfe von KI-Planungsalgorithmen wurden mögliche Ausweichmanöver generiert und priorisiert.
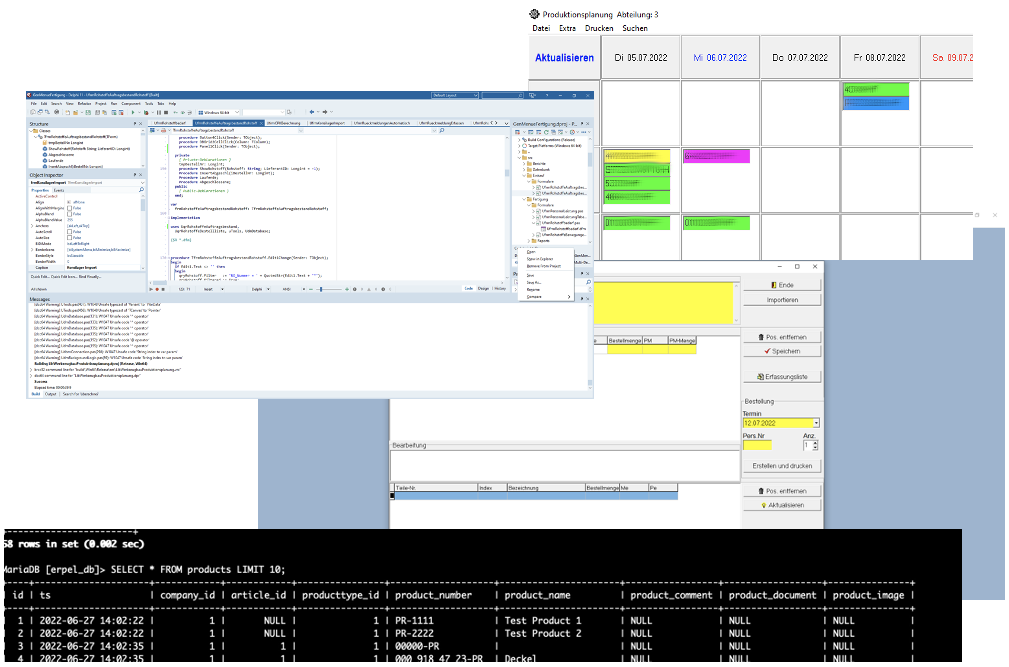
Modernisierung Warenwirtschaftssystem für Produktionsbetrieb
Kundenproblem
- Modernisierung Warenwirtschaftssystem (ERP)
Lösung
- Funktionsanalyse und Lösungsplanung
- Aufräumen und Refactoring des Quellcodes
- Austausch veralteter Komponenten
- Fehlerbeseitigung und Funktionsentwicklung
- Anbindung an SAP Ariba Cloud
Werkzeuge
- Programmiersprache Delphi unter Windows
- MySQL-Datenbank (MariaDB) unter Linux
Hintergrund
Der Kunde verwendet ein Warenwirtschaftssystem mit Datenbankanbindung (ERP), welches seit den 1980er
Jahren unter Turbo Pascal und Delphi fortlaufend entwickelt wurde.
Durch veränderte Rahmenbedingungen entstand beim Kunde der Wunsch, die Software zu modernisieren und um neue
Funktionalität zu erweitern.
Beim Kunde stand die Überlegung im Raum, das eigenentwickelte ERP-System durch eine
Kauflösung zu ersetzen. Diese wäre jedoch teuer und mit dem Risiko eines Verlustes an Wettbewerbsfähigkeit verbunden gewesen.
Auch eine vollständige Neuprogrammierung erschien unwirtschaftlich.
So viel die Entscheidung das bestehende ERP-System beizubehalten und zu modernisieren.
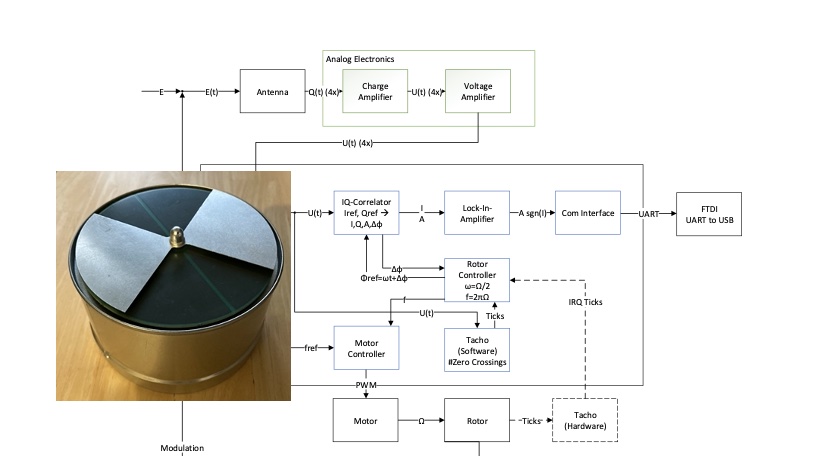
Sensor zur Messung elektrostatischer Felder
Kundenproblem
- Messung elektrostatischer und quasistatischer Felder bei Gewitter
Lösung
- Systemdesign
- Elektronikentwicklung und Programmierung
- Feldmessung auf Teststand und der Atmosphäre
Werkzeuge
- KiCAD für PCB-Design
- Verilog für Signalverarbeitung auf FPGA
- C++ für Firmware, IPC und Treiber
- Qt für Visualisierung
Hintergrund
Als Machbarkeitsstudie und persönlichem Interesse wurde ein System zur Messung quasistatischer elektrischer Felder entwickelt. Anwendung ist die Messung von Gewitterwolken und Blitzen.